ここから本文です。
けいはんなロボット技術センター コンセプト及び背景 Concept & Background
![]()
![]()
![]()
![]()
![]()
- 4年目を終えて(令和5年4月)
- 3年目を迎えて(令和3年4月)
- 10ケ月を経過して(令和2年2月)
- オープンにあたり(平成31年4月)
4年目を終えて --海外勢をキャッチアップ(令和5年4月)
3年目を迎えて --コネクテッドと5Gをベースに更なる展開へ--(令和3年4月)
産業用ロボットの分野で世界のトップを走ってきた日本。しかし、世界の巨大市場を背景に他国の追い上げは激しく、特に生活・社会分野でのロボットの実装は遅れをとっている状況です。
一方、人口減少時代、さらにはPOSTコロナ時代へと社会の環境が大きく様変わりする中、リモート技術、自律制御技術の重要性は高まってきています。
そこで、次世代技術の開発、社会実装を目指すベンチャー企業や中小企業を支援するため、「けいはんなロボット技術センター」を運営しているところです。
- 市場が成熟すれば世界的な競争は激しくなる(一層独自の戦略を歩む必要がある)--
- 市場が成熟せねば販路が拓けず開発が無駄に終わる--
こうした厳しい環境の中にあっても、ビジョンセンサなどの「感覚器」、モーションプランニングなどの「脳」、インテリジェンスモーターなどの「駆動器」、無線伝送などの「エネルギー供給器」などロボット(パーツ)を自社開発して先端を目指す動き、あるいは、そうした世界中の先端技術を理解し取り込むことでより、利用シーンに応じた高度な用途の実現を目指す動きなど、各社各様のチャレンジが続いています。



重量配膳車へのカルガモロボット機能搭載(左)、障害物回避・長期飛行可能なマルチコプター(右)
商品棚自動補充・整理・回収ロボット(外部リンク)(中)
本センターでは特に、多種多様なロボットや乗り物、人が混在する状況でロボットが活躍できる社会環境を想定し、インフラ側センサーシステムや全体を統合的に制御するシステム開発を推進してきたところですが、クラウド経由での異種ロボットの協調活動の開発が進んだ1年目に続き、2年目は位置情報把握、衝突防止監視のためのインフラカメラを用いて、混在状況でのレベル4自動運転の実証が本センターの屋外において行われました。


また、2年目から5G基地局を備えるとともに、5G実証のための補助制度も創設し、多くの実証が行われ、けいはんな地区を飛び越え、アミューズメントパーク初となる、ローカル5Gを用いたロボット操作デモンストレーションも行われました。


メッシュ型WiFiと5Gの組み合わせ実証(左)、ローカル5Gを用いて一人称視点でリモート操作するロボット(右)
3年目を迎え、学研地区の研究機関との連携を通じた技術の高度化、情報の機密を重視したエッジでの異種ロボットの協調システムの開発など、さらなる開発・実証を推進してまいります。
オープン10ケ月を経過して --進むロボット開発と人材育成-- (令和2年2月)
進む自律ロボット開発
京都府では、2019年4月に、中小企業・ベンチャー等が共同利用できるロボット開発・実証拠点「けいはんなロボット技術センター」をオープンし、自律ロボットをはじめとする次世代技術の開発を推進するなど、人口減少社会を支えるロボット産業の振興を図っており、京都企業や新たに京都に拠点を構えた企業によって、現在、様々なロボット技術の開発が進められています(詳細「IoT/IoE AI Robot」)。
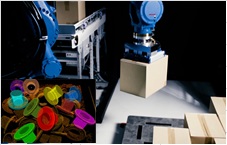
ティーチングレス・アームロボット
従来のアームロボットは、ティーチング(プログラミング)した順番通りの動作を忠実に行うもので、ティーチングに何か月もの時間を要し、そのコストがかかるだけでなく、その動作専用のロボットとなるため、大量生産工程等でない限りロボットの導入自体を進めにくい状況でした。
しかし、ビジョンセンサ等を組み合わせ、自律的に動作する、障害物を避けるなどのモーションプランニング機能を一層高めた「ティーチングレス・アームロボット」の開発が進められており、これにより「日々違う作業をこなすロボット(高い汎用性)」や「人と肩を並べて働くロボット(高い安全性)」の実現が期待されます。


(左から)混載荷物を正確に荷下ろしするロボット(KYOTO ROBOTICS)、靴紐を通すロボット(JRC)、人から物を受け取れるロボット(JOHNAN)
さらに、ビジョンセンサやジャイロセンサ等から取得したデータを学習することで、従来のプログラム型ロボットでは困難であった液体や粉体等の量り取りが可能で、動けば動くほど精度が上がる「AIアームロボット」の開発も進んでいます。

液体を量り取るAIアームロボット(エクサウィザーズ)
ティーチングレス・走行ロボット
自律走行するロボットは、近年、多くのメーカーから多種多様なものが登場してきていますが、ロボット搭載センサや環境側センサの情報、その他周辺環境の情報をクラウドで管理することで、経路のティーチングを不要とする「ティーチングレス・走行ロボット」の開発も進んでいます。

ティーチングレスで、人や他のロボットの動きに応じてリアルタイムで経路を変更できる走行ロボット(Rapyuta Robotics)
コネクテッド・ロボット
さらに、異なるロボット開発企業どうしが協力し、自律アームロボットと自律走行ロボットどうしが共演する「コネクテッド・ロボット」の開発も進められています。

けいはんなロボット技術フォーラム2019 Autumunでのデモンストレーション(T-ROBO、Rapyuta Robotics)
ワイヤレス・エネルギー供給
「知覚」「判断」「制御」のほか、「エネルギー」もロボットの極めて重要な要素です。マイクロ波を通じてワイヤレスで給電、データ返送をする技術の開発が進んでおり、マシンの予防保全の精度向上や、ロボットやドローンから環境センサ等のデータ収集による「計測」「もの探し」「人捜し」、ロボットやドローンへのワイヤレス給電による「動き続けるロボット」「飛び続けるドローン」の実現も期待されます。


(左から)デジタルピッキング用ICタグへの無線電力供給(Space Power Technologies)、自動車・ドローン等からセンサへの無線電力共有(翔エンジニアリング)
ユーザー・コネクション
人手不足により現場のロボット化ニーズが高まる一方、ベンダー、SIerも人手不足であり、ロボット化実現のためには、「相談工数」をいかに減らすかが課題の1つですが、ロボット化相談の「バーチャル窓口」など、新しいロボット関連サービスも登場してきています。

動画送信によりロボット化提案を受けられるサービス(Quiny)
人口減少社会と世界的競争に対峙
けいはんなロボット技術センターオープンより遡る2014年に、京都府、(公財)京都産業21で「生活支援ロボット研究会」を開始しました。これからは、工場等の産業分野だけでなく、建設現場や農林漁業、病院・介護現場などの幅広い生活分野でのロボット活用が伸びていくであろうと言われ始めた時期で、まだ深層学習によるAIブームはおろか、IoTという言葉さえあまり聞かれなかった頃です。それから数年で世の中は大きく様変わりしました。
「ロボット社会」を見据えて
1つは、本格的な人口減少時代に突入したことです。
当時は、「『ロボット』と言えば、現場の人たちから『俺たちの仕事を奪うのか』と猛反対を食らう」「馬車の時代に自動車が登場した時も、人々にその価値をなかなか認めてもらえなかったように、ロボットもまだ価値を見出し切れていない」「真にロボット振興を図るには、効率化の観点からも、インフラを含めた社会の在り方から再構築する必要がある」などと、多くのロボット関連企業が苦労をなさっていました。しかし、人口減少社会にあっては、「仕事を奪う」と言われることはなくなり、「猫の手」ならぬ「ロボットの手も借りたい」が当たり前の時代になりました。
人手不足という、ロボット産業にとっては大きなチャンスが巡ってきたわけであり、ユーザーの期待に沿うためには、価格面も含めて「使える」ロボットを開発していく必要があります。そのためには、ロボットを開発する企業だけでなく、インフラに携わる企業や行政も含めた様々なプレイヤーが、より効率的で効果的なロボット社会の構築に向かって進んでいかねばなりません。
このような考えを背景に、けいはんなロボット技術センターを開設しました。人の動作解析やアニメーション制作で古くから用いられてきた「モーションキャプチャー」を備えたのは、それをロボットに応用し、自律ロボットの動作検証を行えるようにということに加え、将来のロボット社会を見据え、インフラセンサによりロボット制御を統括的に行うといったモデル開発等にも活用できるようにという意図があるのです


力を結集して世界と渡り合う
もう1つは、AI等の新たなテクノロジーの世界的な進展に対して、日本が後塵を拝してきたということです。
現在でも、産業ロボットを中心に成長してきた日本メーカー製のロボットが世界シェアのトップを占めているものの、巨大市場を背景に急速に成長を遂げる中国等の追い上げは激しく、特にAI等の最新テクノロジーにおいては、京都でも京大発ベンチャー等を中心にAI開発の動きが活発になってきているものの、特に社会実装の面で後れを取っていると言えます。
また、市場が成熟に向かうほど、世界的な競争は激しくなり、グローバル企業、あるいは国を挙げて取り組みを進める国々そのものと対峙することになりましょうが、国内を見渡せば「メーカーの壁」が依然として存在しており、メーカーが違っても同じルールで動く自動車のように、メーカーや種類を越えてロボットどうしが連動したり、協調行動を行ったり、共通ルールで動いたりといった、効率的・効果的なロボット社会に向けた仕組みづくりには、まだ道が拓けていないのが実態です。
こうした危機感から、けいはんなロボット技術センターは「共同利用型」施設としました。「1500㎡の大空間」に仕切りは設けておりません(機密事項の開発用にパーテーションの用意はあります)。そもそもロボットは様々な企業の有する様々な要素技術の組み合わせでもあるわけですが、ベンチャーも中小企業も大企業も、誰もが顔が見えるオープンな場とすることで、企業の垣根を越えた「ONE TEAM」を結成し、世界と伍することのできる技術が生まれることを願っているのです。
既に同センターをきっかけに、連携して開発されている例も生まれています。さらに、オープンソースロボットに関する勉強会や5Gに関する勉強会等も行ってまいりました。


人口減少社会を救い、世界と戦える人材の育成
このように、人口減少社会を救い、世界的な競争に伍していくことのできるロボット技術等が開発されることを目指し、既にティーチングレス・ロボットをはじめとする次世代技術の開発も進んでいるところですが、課題は「人材育成」です。人口減少、人手不足の時代である上に、ベンチャーや中小企業は、知名度や経営資源に限りがあり、人材の確保や育成は企業の存続すら左右し得る大きなテーマなのです。
挫折を乗り越え、世界と戦える人材を育てる「RoboMaster」
そこで、京都に優秀な若手技術者を集め、育成する取り組みを始めることとしました。それが「RoboMaster Japan Open」です



RoboMasterとは、民生用ドローンの世界的企業DJI社主催のエンターテイメントロボットバトルコンテストで、中国深センで行われる本大会は、世界各国から170以上のチーム、約1万人の若手エンジニアが参加(2019年度)し、ネット配信でも15か国、195万人以上が観戦しています。

先端テクノロジーで先行する中国等に、これ以上引き離されないこと、そして少しでもその差を埋めていくこと、そのための技術研鑽の場を京都で展開していこうということなのですが、それ以上に、私どもが着目したのは、コンセプトの1つに「挫折」という言葉があった点です。
DJI創業者のフランク・ワン氏自身がロボットコンテストで技術を磨き、DJIを創業されたそうで、そうした経緯から、若手人材の育成のためにRoboMasterを始められたそうです。RoboMasterは、細かいレギュレーションを読み解きながら、高い性能を発揮するロボットを設計から製作まで全て行う必要があり、技術課題に関する問題解決能力、理論的な知識を実践に生かす能力だけでなく、チームワーク、ゲーム戦略、さらには、資金調達力までが複合的に試されるものです。これまでの国内の学生ロボットチーム等と異なり、学生たちが自らスポンサー集め、開発場所の確保も行い、結果を出さないと出場すらできません。まさしく、アントレプレナーの育成なのです。


実際に、「練習試合」として昨年開催した「Winter Camp」においても、あるチームは「資金も集まらず、メンバーが空中分解してしまった」と出場を急きょ断念されました。今回の「Japan Open」においても、残念ながら資金その他の体制が整わず参加を断念されたチームがあります(私どもと一緒に裏方業務をお手伝いいただくこととなりました)。資金、組織を束ねるリーダーシップなど、技術以外にも様々な要素を磨いていかないと成立すらできないのです。断念した彼らには申し訳ないですが、こういう挫折こそ大事なことであり、彼らの今後の大きな成長に繋がるものだと考えています。こうした様々な経験をした人材が、「次なる活躍のステージ」として、京都のロボット関連企業を選んでくれることを期待しています。


京都発チームの誕生
ありがたいことに、京都発チームも2つ誕生しています。
1つは、RoboMaster等に参加している「Scramble」。既に、けいはんなロボット技術センターと同じ建物(けいはんなオープンイノベーションセンター)に居室も確保し、開発、練習に専念できる体制を整えています。
もう1つは、地元の中学生・辻君が立ち上げた「VEX競技会」出場チームです。
こうした中高生から高専生・大学生、そして社会人まで、人材育成の道が広がっていけばと思います。


(左)Scramble (右)「VEX競技会」出場チーム
そして5Gへ
コネクテッドロボットや遠隔操作ロボット、自動運転に不可欠と目される「5G」。
それらの開発・実証が行える環境を整備し、2020年3月25日よりご利用いただけます。

オープンにあたり (平成31年4月)
 まゆまろロボットが社会で活躍するには―
まゆまろロボットが社会で活躍するには―
京都府のゆるキャラ「まゆまろ」をロボット化し、自律的にそこかしこを動き回って自らの仕事を果たすようになるためには、どんな課題を克服すればいいのか。そんな設定からこのプロジェクトはスタートしました。制御技術、安全性などの技術上の課題、洗練度や価格といった製品上の課題、通信、インフラ整備などの環境上の課題など、様々なレイヤーにおいて課題が存在していますが、そもそも現在の日本の法律では、「まゆまろロボット」として想定するような自律移動ロボットが公共の道路を動き回ることは許されていないのです。
ロボットニーズも次世代へ―
そのような自律移動ロボット、特に屋外をはじめ周辺環境が激しく変化する状況に耐え得るものが、まだ世の中にほとんど登場していないのですから、仕方がありません。ただし近年は、人口減少、人手不足を背景に、自律ロボットなど次世代ロボットのニーズが確実に高まってきています。例えば生産現場で、「トラックから部材を下ろす作業から、フォークリフトでは恩で、生産ラインに乗せる作業までの一連の工程をロボットで全自動化したい」「人に頼ってきた組立工程を、いよいよロボット化せざるを得ないが、たくさんの専用ロボットを揃えていたのではコストが合わないので、汎用ロボットに様々な作業をさせたい」といった、これまでにないレベルの要求が生じてきています。
技術、製品、環境、各レイヤーに課題あり―
こうした要求に応えていくためには、冒頭に記載のような様々な課題を解決していかねばなりません。例えば、LiDER等を用いて事前に3Dマップを作っておく方式においては、その後に環境が変化する場合に機能しにくくなるという問題があります。また、そうした弱点を補うために、ロボットに様々な高性能センサーを搭載すれば、価格が割高になってユーザーに優しくありません。さらに、ロボットは、走行するもの、飛行するもの、ものを捉えるもの、案内するもの、自ら買い物するもの、家事をするもの、救護するものなど機能や目的も多種多様です。そうした多種多様なロボットの種類を超えて、あるいはメーカーの違いを超えて、連動、協調できるようなインフラの整備も課題です。
府内外、国内外から英知を集めて次世代ロボットの開発を―
もしかしたら、ロボットに搭載されているセンサーの一部をインフラ側に移したり、測位、位置推定技術をロボットどうしでシェアリングすることで、全体の低コスト化を図ることが正解かもしれません。あるいは、ロボットの種類、メーカーの違いを超えて連動・協調できるよう、コントローラのオープン化・統合などを図り、ロボットのためのバリアフリーを推進することが正解かもしれません。何が正解なのか、様々な企業、ベンチャー、研究機関等の皆様に、未知なる次世代ロボットやロボットインフラの開発を推し進めていただく「場」として、この「けいはんなロボット技術センター」を開設したところです。
本センターが入居する「けいはんなオープンイノベーションセンター(KICK)」には、研究棟やシェアードオフィスがあります(いずれも登記可)。その他にも補助金をはじめ京都府では様々な支援メニューをご用意しております。企業、ベンチャー、研究機関等の皆様、是非、ここ「けいはんなロボット技術センター」にお集まりください!


お問い合わせ