ここから本文です。
LiDAR(Light Detection and Ranging)による障害物検知



(2019年5月31日 ものづくり振興課 土江)
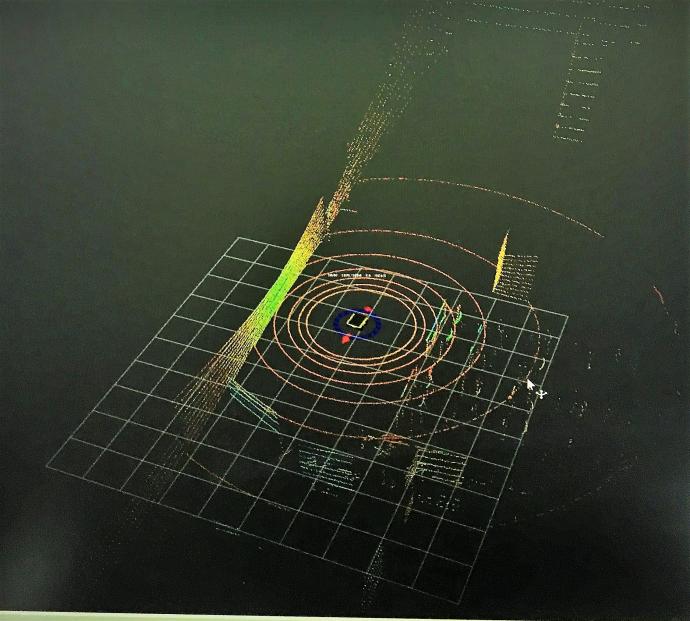
5月30日(木曜)、(株)T-ROBOの小倉さまがお越しになり、ROS対応走行ロボットJackalに搭載したLiDARユニットを使った障害物検知を行われました。

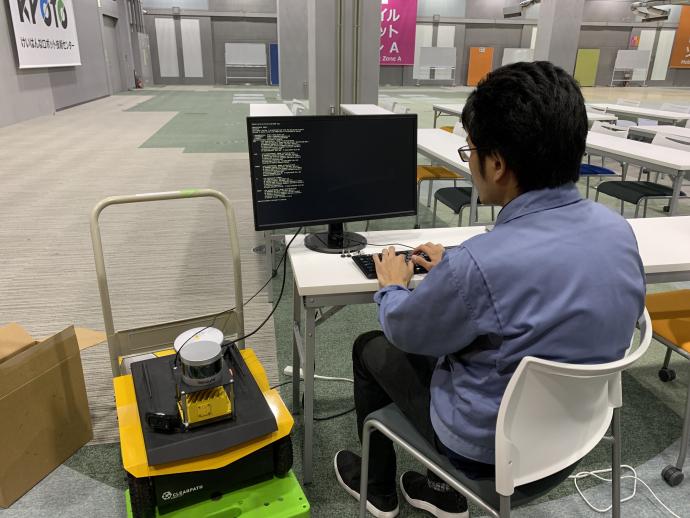
モニター上で、LiDARユニットが壁面や柱、机等の障害物の位置を正確に検知していることが見て取れました。

LiDARについて
Light Detection and Rangingの略語で、目に見えない波長のレーザー光を出し、障害物に当たって跳ね返ってくるまでの時間差により、その障害物との位置関係(距離、方向)を測定するセンシング方式です。
ソナーやレーダーと同様の原理で、音波や電波の代わりに光を用いた反響定位(Echo Location)で、素早く正確に障害物検知ができることから、近年各地で行われている自動運転の実証等でよく活用されています。
レーザー光を使うため、電波の反射率が低い段ボール箱や木材、発泡スチロールなども検出が可能で、障害物の反射率からその材質もある程度把握することもできます。

企業概要
- 企業名:株式会社T-ROBO
- 設立:平成28年4月
- 代表者:代表取締役社長 林 弘幸
- 所在地:京都市伏見区治部町105 京都市成長産業創造センター内
- 「京都企業紹介」ページはこちら
http://www.pref.kyoto.jp/sangyo-sien/company/t-robo.html
お問い合わせ