ここから本文です。
知の京都- 野田智之さん(株式会社国際電気通信基礎技術研究所(ATR)適応コミュニケーション研究所)
けいはんな学研都市立地企業、スマートシティ関連企業、けいはんな学研都市付近で開催されるイベント・史跡等を紹介するページです。



![]()
![]()
アシスト中に「透明」になるリハビリテーション用ロボット
(2024年5月23日、文化学術研究都市推進課 足利)

アシスト中に透明になる??
耳慣れない言葉を聞き、株式会社国際電気通信基礎技術研究所(ATR)脳情報研究所ブレインロボットインタフェース研究室(外部リンク)の野田智之博士にお話をおうかがいしました。
セラピストが目指すリハビリを実現する「歩行介入エンジン」
「透明性って、最近活用されている概念で・・・」と語る野田さん。
これまで「歩行介入エンジン」などの研究開発を行ってこられました。「歩行支援ロボット」は既に様々なものが登場していますが、野田さんらが研究開発されているのは「セラピストが目指すリハビリを実現するロボット」です。それは「歩き」ではなく「筋肉」そのものの働きをサポートするものです。例えば「足首を何度動かす」といったことではなく、筋肉の動きから神経回路との連携を構築し、リズムを整えてあげるといったことです。
実証を行った患者さんからは「病気になる前の歩行を思い出しました!」などと大いに成果が挙がっているそう!

融合型ハイブリッド直動アクチュエータ
そして本題の「透明性」ですが、利用者が動いた際に、ロボットがその動作に追従して動き、ロボットの存在を力覚的に近くできない状態になっているというものです。
つまり、まずは、ロボットの動き自体をレベルアップすることが必要だということがわかります。それを支える技術の一つとして、電気通信大学大学院の仲田さんらとともに開発されたのが、融合型ハイブリッド直動アクチュエータです。
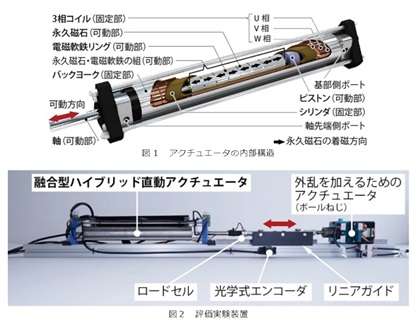
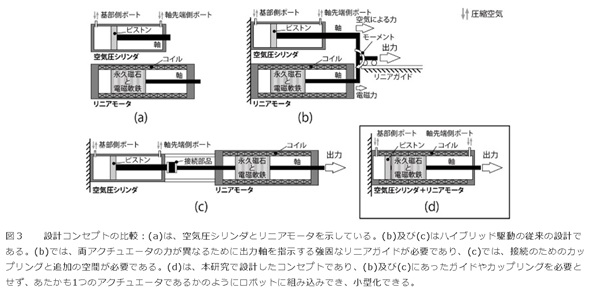
その概念自体は以前からあったそうですが、「実用化レベル」まで到達したのが、野田さんらのアクチュエータです。空圧と電磁力を用いるわけですが、それをどう機構として成立させるかというところに知恵と工夫が詰まっているのです。
アシスト中に「透明」になるリハビリテーション用ロボット
「機械的な透明性」の中でも、今回研究開発されているのは、従来のものではなくリハビリ時のものです。従来のものは、人(健常者)の動作(力)の感知がトリガーとなって、例えば人の腕に当たらないようにロボットが動くというものです。今回は、リハビリが必要な、つまり動かない腕を動かす必要があるので、腕をロボットが導きながら(アシストしながら)、しかし、ロボットの存在を感じさせないという、相反するベクトルを実現するというものです。
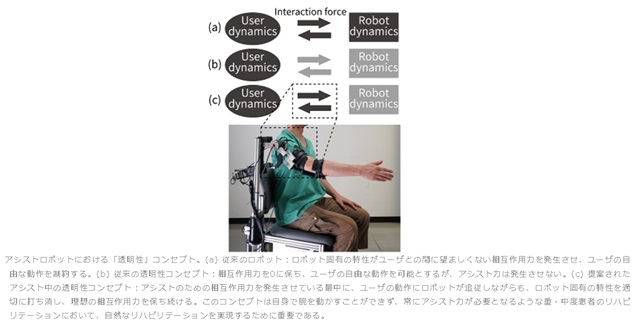
この絶妙なバランスにより「アシストされているのに、自分で動かしているよう」な状況を作り出しているのです。すごい!
お問い合わせ
けいはんな学研都市推進の一環で、株式会社国際電気通信基礎技術研究所(ATR)脳情報研究所の野田智之さんを紹介するページです