ここから本文です。
知の京都- 高瀬英希さん(京都大学大学院情報研究科通信情報システム専攻 高木研究室 助教)
産学公連携、産業振興の一環として、京の研究者・専門家の皆さんを紹介するページです。

ものづくりをより簡単に― ロボット開発の世界の潮流を見据えた「mROS」
(掲載日:令和元年7月1日、聞き手・文:ものづくり振興課 足利)

京都大学大学院情報研究科通信情報システム専攻 高木研究室 助教の高瀬英希さんにお話をおうかがいしました。
組込みシステム集積回路FPGAをより簡単にする「SWORDS」
―先生はどんな研究をなさっているのですか?
高瀬) まず、高木研究室では、コンピュータ全般のアルゴリズムレベルからアーキテクチャレベルまで幅広く研究対象としていて、大きく分けて3つの研究を行っています。1つは集積回路の高性能化等に関する研究、2つ目には超電導デジタル回路に関する研究です。SFQ(Single Flux Quantum)回路と呼ばれるもので、従来の論理回路よりも少ないエネルギーでとても高速なコンピュータが実現できるものですね。そして、3つ目が、私の研究分野である組込みIoTシステムの研究です。
―組込みシステムですか。
高瀬) ざっくり言えば、汎用システム以外で特定の機能を実現するためのコンピュータシステムのことですね。例えば、お掃除ロボット、自動車、その他多くの生活関連の情報家電などの中に入っているコンピュータですね。そうした組込みシステム全般を研究していまして、OS等の基盤ソフトウェアによって組込みシステムを省エネルギー化、最適化するための研究ですとか、プログラマブルSoCにおける協調設計技術の研究ですとか、応用システムとしてはROSやロボットの研究をしています。
―プログラマブルSoCって何ですか?
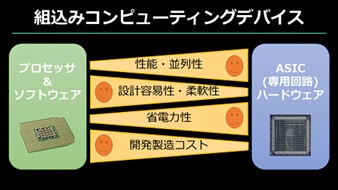
高瀬) まず、ハードウェアの代表的なものには、プロセッサとASIC(特定用途向け集積回路)があります。設計容易性・柔軟性、開発製造コスト面ではプロセッサが、性能・並列性、省電力性ではASICが、優れています。
―なるほど。
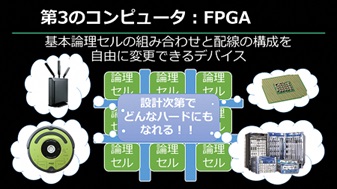
高瀬) そして、両者のいいとこ取りをしたものとして、FPGAという集積回路があります。回路構成を書き換え可能で、設計次第でどんなハードウェアにもなれるものです。最近の潮流としてはプロセッサとFPGAを同じデバイスに集積して繋げる技術がありまして、このデバイスがプログラマブルSoCと呼ばれています。
―FPGAは、どうして書き換え可能なのですが?
高瀬) FPGAはハードウェアとしては論理ブロックが格子状に並んでいる構造になっています。その論理ブロック自体も書き換えられますし、ブロックどうしの繋がりも書き換えることができます。これらの組み合わせを設計することで、設計したハードウェアを自由に書き換えることができるのです。
―そうなのですね。
高瀬) しかし、プログラマブルSoCを使いこなすには、ハードウェアの設計や通信のことまで考えないといけず、とても大変です。そこで、私は、このFPGAを使いこなすシステム設計環境として「SWODRSフレームワーク」の開発を進めています。
―どういったものなのでしょうか?
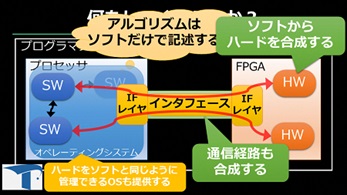
高瀬) まずプログラムの上で、普通にソフトウェアだけでアルゴリズムを記述し、それで、どの処理をハードウェアにして速く動かしたいかを決めればいいというものです。SWORDSはそのソフトウェアの一部分を切り出して、ハードウェアに合成したり、ソフトウェアとハードウェアの間にインタフェースという通信経路も合成します。また、ハードウェアをソフトウェアと同じように扱えるようなOS機能も提供しています。
ロボット開発の世界の潮流ROSをより省電力化する「mROS」
―素晴らしいですね。では次に、ROSの研究についてはいかがでしょう。
高瀬) 冷蔵庫などの家電やスマートフォン等は、1アイテムの製品でかなりの数量が製造されることが多いです。しかし、ロボットは、使用環境や要望に応じて様々なものがあり、ケースによっては10台、あるいは1台売れればいいというものもあります。つまり、多品種少量生産が求められるドメインです。しかも、ロボットは、実世界とのやりとり、つまりインタラクティブ性をより求められるものです。
―そうですね。
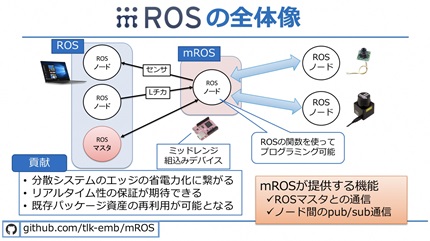
高瀬) つまり、開発するのが大変です。1アイテムずつ、いちから作っていくのが大変なので、そうなると共通化できるところは共通化した方がいいという考えが世界的な潮流になっているわけです。このような開発者目線で生まれたのが、Robot Operating System(ROS)という、オープンソースの開発プラットフォームです。ROSが主に提供する機能として、ロボットどうし、あるいはロボットの頭や手足といったロボットの中の部品どうしをつなぐ通信フレームワークという面があります。
―府が整備したけいはんなロボット技術センターも、まさしく、ロボットが多品種少量であるという前提を踏まえ、ロボットが効率的に繋がる、協調・連動できる社会システムの構築なども目指す姿の一つです。
高瀬) ただしROSの欠点として、ロボットが一般的に高性能なコンピュータであるということもありますが、高性能なプロセッサを用いて、Linuxカーネル上で動作させる必要があります。そうすると、高性能なプロセッサですから消費電力が大きいです。プロセッサのモジュールもリッチな機能を有しがちですし、リアルタイム性能(処理を定められた時刻までに完了できる性能)を確保するのも簡単ではありません。
―なるほど。
高瀬) そこで私たちは、mROS(外部リンク)というものを開発中です。たしかにロボットの頭脳は賢くないといけないのでリッチな機能は必須ですが、目や手足といった末端の動作は、そんなにリッチな機能を必要としないはずです。その一方で、これらの動作には省電力性やリアルタイム性能が強く求められます。mROS(外部リンク)はこのようなところに組込み技術を活用できるようにするシステムであり、消費電力が通常のものより相当小さくできます。また、ROSのAPI互換による既存技術の移植性も高めています。
―素晴らしいですね。ところで、mROSのmは何ですか?
高瀬) 組込みは英語ではエムべデッド(embedded)と言いますが、このmを取っています。なお余談ですが、Ruby(ルビー)という、まつもとゆきひろさん、通称 Matzが開発された国産のプログラミング言語がありますが、その組込みシステム向けの軽量板がmrubyと言うとことにも倣っています。
―iPSという名称がiPodから着想されたというのと同じようなものですね?!
高瀬) そういうことですかね(笑) 現在、このmROSとFPGAを組み合わせて、ロボットシステムをより省電力にできる開発フレームワークが構築できないかなと検討しているところです。
「ものづくり」をより簡単に
―先生はいつから研究を志されたのですか?
高瀬) 「大学に入る=研究をする」と思っていたので、高校生の時には志していたのでしょうね。やはり研究ということで、誰もやっていないことをしたいと思っていました。しかし、大学に入学したら、まずは講義ばかりで、高校の授業と変わらないじゃないかと不満を持っておりました。今となってはその時の講義で身につけたことの重要性は分かりますが、おかげで当時の成績はとてもよくなかったですよ(笑) そしてじきに研究室配属されて研究することができるようになり、修士課程で研究を続けてもまだまだ物足らない、博士課程で研究を続けてきてもまだまだ飽き足りないし、やればやるほど終わりが見えずにどんどんやりたいことが出てくる、といったうちに現在に至ってしまったというところです。
―研究がお好きなのですね。今後の展望についてはいかがでしょう。
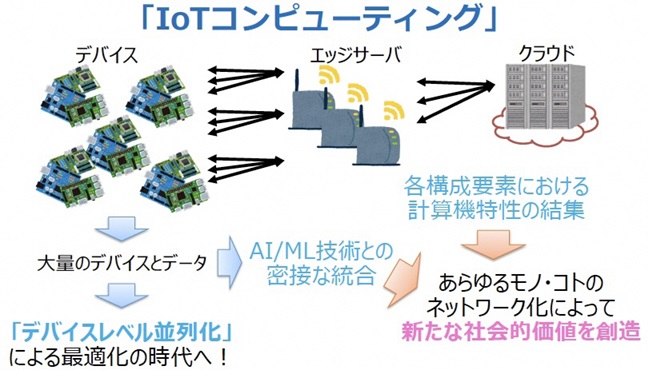
高瀬) かつては、一つひとつのシステムを個別に開発してきましたが、IoT時代のものづくりでは、「デバイス―エッジサーバ―クラウド」といった系全体を捉えてシステム開発を進める必要があると思います。デバイスからはセンサを通じて大量のデータが収集されますし、いわばデバイスレベルでの並列化の時代が来ています。サーバもそれに対応しないといけない時代になってきました。あるいは、AI等の技術との密接な統合も必要です。このように、それぞれの段階で、開発が大変になってきていますから、統合できるところは統合すべきだと考えています。このような思想から、最近では、IoTシステムで扱うデータの処理や通信に着目した開発フレームワークづくりを進めていきたいと考えているところです。
―そうなのですね。
高瀬) 私の研究のモチベーションとして、「ものづくり」はやっぱり面倒じゃないですかというのがあります。私もものづくりしますが、面倒くさくて大変です。これを簡単に誰でもできるようにしたい。だから、ものづくりを簡単にするためのものづくりをする研究をしているといった感じで、ぐるぐると堂々巡りしている気はします(笑)
ものづくりを簡単にするためのものづくり!今後がますます楽しみです。
お問い合わせ